


Review on blade propulsive efficiency
![]()
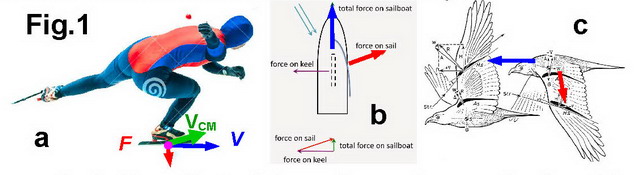
A similar effect of dynamic gearing can be
found in other cases, which helps to achieve a higher locomotion speed at lower
speed of the propulsive force (Fig.1):
┬Ę
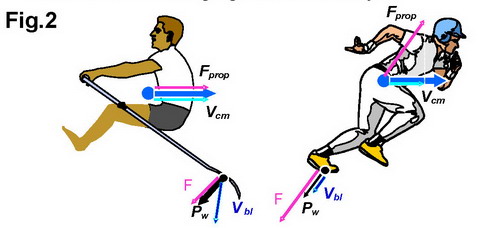
In speed-skating or cross-country skiing, the athlete applies force at
the skate/ski sideways, but can go faster forward than runners, who apply
propulsive force directly backwards;
┬Ę
In sailing, boats can go faster at side and even at cross-head wind than
at direct tail wind;
┬Ę
Birds swing their wings up and down (quite slowly sometimes), but fly
forward.
┬Ę
Swimmers and canoeists move the hand/paddle sideward to increase
propulsive efficiency.
Pw = F Vsl cos(Žå) (1)
Ebl = Pprop
/ P = (P ŌĆō Pw) / P (2)
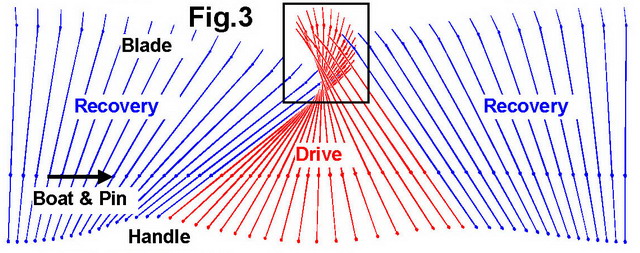
With BioRow telemetry system, we can measure
very accurately oar angles and boat movement, use this data to reconstruct the oar
path during stroke cycle (Fig.3) and get a picture similar to video from the
top.
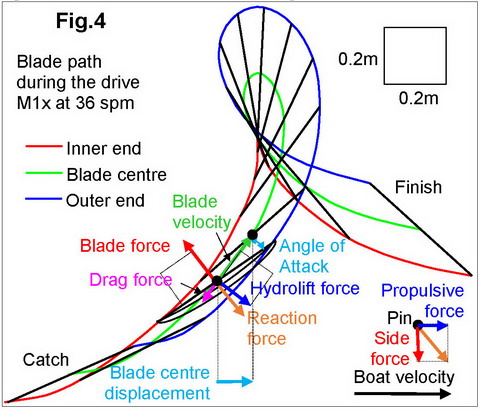
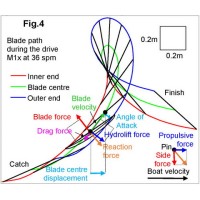
With more detailed analysis of
the blade movement during the drive (Fig.4), we can derive the velocity vector Vbl at its centre, an angle of attack Aa of the blade relative
to the water (it is important to take into account the bend of the blade), and a
force applied to the centre of the blade Fbl
could be derived from the measured handle force and gearing ratio. In this
case, the centre of the blade moves forward with the boat from the catch to
the oar angle about -25 deg before the pin, and then again from about 15deg
after the pin till the finish, so it moves backwards only about 35% of the
drive time and slips backwards only about 12cm. The outer tip of the
blade slips more (about 30cm), but the inner edge doesnŌĆÖt slip backwards at
all and always moves forward with the boat. During the total drive time,
the blade centre moves 1.68m forward with the boat.
If the blade moves through the
water at the angle of attack Aa different from 90o, it
creates a hydro-lift force Flift, so the blade works as a foil
(RBN 2007/12). The lift force Flift always has orthogonal
direction to the blade velocity vector Vbl, therefore, this force never
consumes any power and has 100% efficiency. All energy losses depend on the
drag force Fdrag, which acts in the opposite direction to Vbl.
Flift
and Fdrag are components of a total blade reaction force Freact,
which has the same magnitude and opposite direction as the blade action force Fbl.
Freact
is transferred through the oar shaft to the pin and can be decomposed to the
propulsive force Fprop, which moves the whole system forward, and side force Fside,
which does not create any energy losses, because it is perpendicular to the
boat velocity. It is important to understand that, any slippage of the blade in
the water creates energy losses, no matter which direction, even if the blade
moves forward with the boat as it mainly does during the drive.
An equation defining the blade efficiency is quite complex (RBN 2012/06)
and includes the blade velocity Vbl , force Fbl , and angle of attack
Aa,
as well as water density Žü, the area of the blade S,
and the combined drag factor of the blade k (which depends on the blade shape
and the angle of attack):
Ebl = 1 ŌĆō sin(A╔æ) /(k Žü S)0.5
Fbl0.5/ Vbl (3)
This equation can be useful
for defining the following factors affecting the blade propulsive efficiency.
1. The blade efficiency is
higher, when the angle of attack is sharper (sin Aɑ is lower), which
happens at the beginning and the end of the drive.
2. The blade efficiency is
higher, when any of the multipliers k, Žü or S increase: the blade shape is more
efficient (kŌåæ), and/or the water is denser (ŽüŌåæ), and/or the blade
area is bigger (AŌåæ).
3. The blade efficiency is
higher, when the blade force Fbl is lower, which, again, happens
at the beginning and the end of the drive, and (in combination with sharper
angles of attack) explains the rise of the efficiency curve. At the same handle
force, the blade force is lower at shorter inboard and/or longer outboard, so the
blade efficiency is higher at a heavier gearing ratio. If the blade force Fbl
is getting close to zero, its efficiency approaches 100%, but the blade doesnŌĆÖt
work for propulsion and becomes useless. For this reason, the stronger
rowers in a crew usually have lower blade efficiency, and vice versa (with
some exceptions, however RBN 2018/08).
4. The blade efficiency increases,
if the blade velocity Vbl became higher,
which happens at a faster boat velocity. This explains why the blade efficiency appeared to be higher in faster / bigger boats and
at faster weather conditions (tail wind), though the real slippage of the
blade could be the same - the blade doesnŌĆÖt work better in the water.
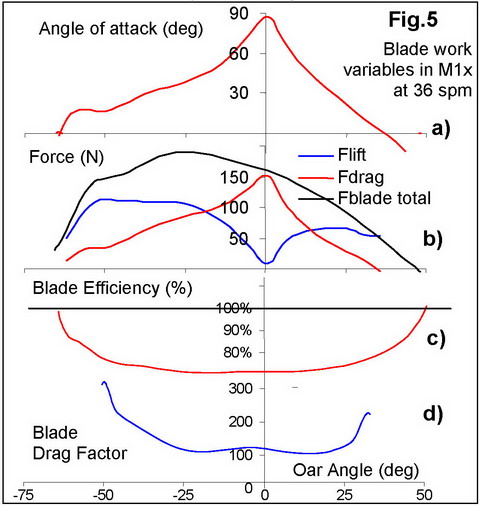
The last point above indicates
that the blade efficiency may not be a completely adequate measure of the
quality of the blade work, so we tried to find another indicators for it and
developed the blade Drag Factor DFbl concept (RBN
2018/05-07, Fig.5,d), which is the ratio of the blade force Fbl
to the square of its slip velocity Vbl in the perpendicular
direction (DFbl = Fbl / Vbl2).
Blade DFbl does not depend on the boat velocity, but
it gets very high at the beginning and end of the drive, when the blade slip
velocity is low, making it more difficult to analyse. It was found that average
DFbl (400+) is more than 100 times higher than the
boat DF (~3 in 1x), and this is a condition, which makes it possible to move
the rowers-boat system forward.
With its average 80% efficiency, the blade is a
quite effective propulsive device. From the total rower energy losses, less
than 6% is spent on the slippage of the blade, and the main part is lost in the
rowerŌĆÖs body. Some factors have an opposite effect on the blade and rowerŌĆÖs
efficiencies, and attempts to increase the former may decrease the latter and
therefore decrease overall rowing efficiency: for example, heavier gearing
and bigger blade area increases blade efficiency as it was shown above, but it
makes the handle velocity much slower, which could be inefficient for a rower
(RBN 2007/09), as it makes the drive time longer, decreases the stroke rate and
rowing power, and so the rowing speed. Also, a bigger blade is more difficult
to handle at the catch and finish, and it may create a higher aerodynamic drag
during recovery.
Other factors have a similar effect on various
efficiency components: as the blade efficiency is higher at the beginning and
end of the drive, it is beneficial to increase force quicker after the catch
and maintain it higher before the finish, in other words, to make the force
curve more rectangular. This is also good to the total power production and
effective dynamics of the rowing system.
Concluding: the blade propulsive efficiency and drag factor could be used for evaluation
of the equipment quality and rowerŌĆÖs oar handling skills, but for the best
rowing performance, other components of the system must be taken into account
to find an optimal balance.
┬®2019 Dr. Valery Kleshnev www.biorow.com