HDF evaluation on the water and rowing machines
Here we try to finalise
our analysis of HDF and give benchmarks for its practical
application. In the previous Newsletter 2020/04, the Mass-Equivalent ME
was derived from HDF and the stroke length s:
ME = 0.5HDF s = 0.5Favs/vav2
= 0.5Fav tdr2/s (1)
where Fav is
average handle force, - vav average handle velocity, tdr
- drive time The mechanical interpretation of ME is quite clear
and understandable: Mass-Equivalent is equal to a mass, which a rower would accelerate
horizontally in ideal conditions without gravity and friction, having the same
overall feeling of “heaviness” as in the given rowing conditions. ME
depends on external conditions and rigging (small boat, head wind, heavier
gearing – larger ME, and vice versa) and a combination of applied force, drive
time and stroke length.
Importantly, the Mass-Equivalent
is not the same as the force applied by a rower. With constant ME,
a rower may pull harder or lighter: higher force increases the handle acceleration
and velocity, so drive time would be shorter, and vice versa. To shorten the
drive time twice, a rower has to apply four times the force at the same ME.
ME could be derived for the drive time only (let’s
call it MEdr), or it could be distributed over the whole stroke
cycle time (MEcyc) – multiplied by the rhythm value (ratio of the
drive time to the cycle time).
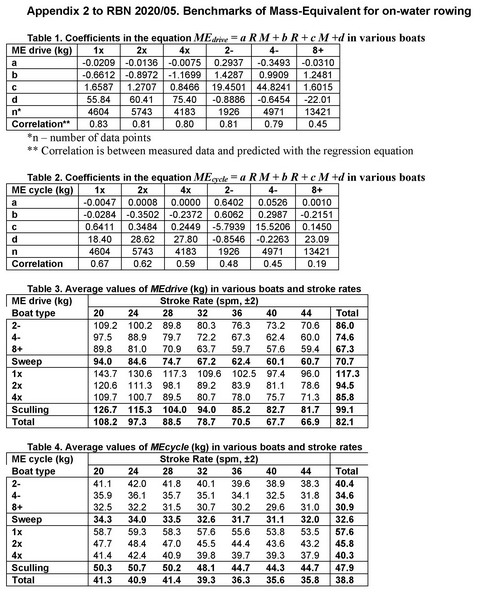
The two main parameters
affecting ME are the stroke rate R and rower’s mass
M, so it can be statistically represented by the linear regressions:
ME = a R M + b R + c
M +d (2)
The BioRow database of on-water measurements was used for
obtaining benchmarks for ME, and the above equations were derived
for both MEdr and MEcyc in all six boat types.
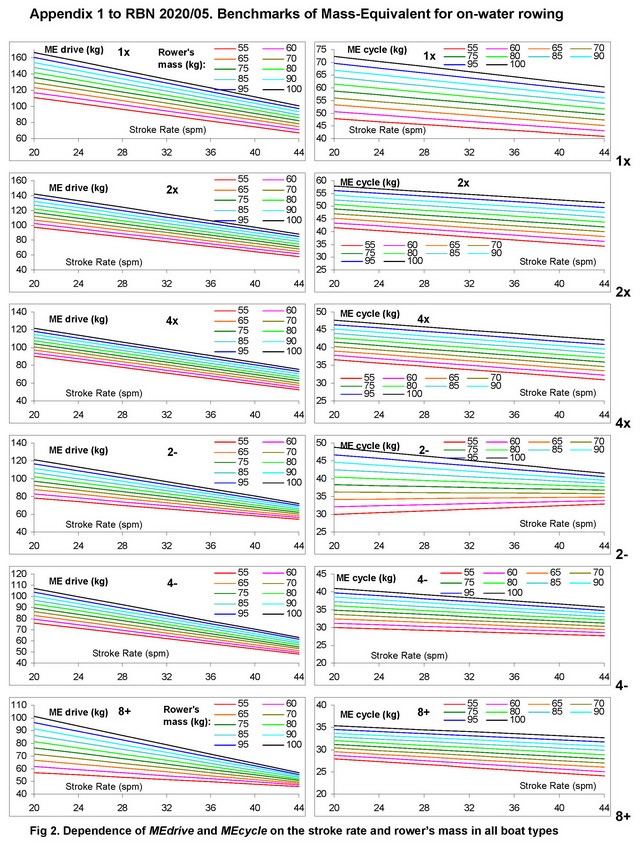
Fig.2 in the Appendix 1 shows regression lines, Tables 1-2 in the Appendix 2 represent
the coefficients in the equations, and Tables 3-4 - average values in all boats.
MEdr values are higher than MEcyc and
they reflect the real feelings of the rower during the drive (because this is
the only phase where the rower applies force), and also they are quite close to
the mass of the rower-boat system and to weights used in weight training by
rowers, which makes MEdr quite meaningful. However, MEdr
is very dependent on the rowing rhythm stroke rate, so it just repeats the same
trends as HDF, which was discussed before (RBN 2020/04).
MEcyc values are 2-3 times lower than MEdr,
but they are less dependent on the stroke rate, so they better reflect external
conditions. In sculling boats, MEcyc slightly decreases with the
stroke rate, while in sweep boats it is nearly constant and even increases in
pairs. This could be related to the racing stroke rate, which is higher in sweep
boats. Interestingly MEcyc values are nearly equal in 2- and 4x,
as is the average racing stroke rate of these boats (RBN 2019/08).
Both definitions of
Mass-Equivalent ME could be used for the evaluation of rowing’s “burden
factor”: ME-drive reflects what the rowers feel; ME-cycle
describes external conditions.
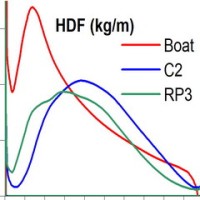
How do rower’s feelings
relate between rowing in a boat and on the rowing machine? Fig.1 shows a comparison
of instantaneous HDF values and scaled handle force and velocity in
M1x (88/288cm gearing, 32.7 spm); on a static Concept2 erg (DF=125, 30.9spm)
and on a mobile RP3 erg (K=0.88, 31.9spm):
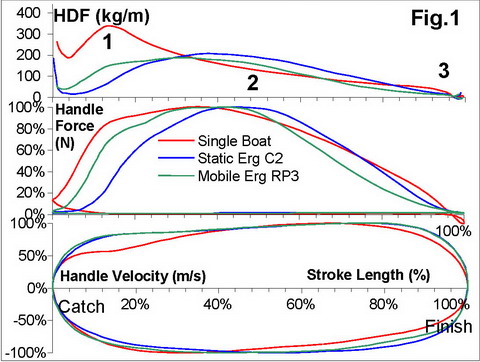
After the catch and
during the first 20% of the drive length, in-boat rowing feels twice as “heavy”
than on a rowing machine (1), this
allows force to increase much quicker. The obvious reason is the oar’s dynamic
gearing: the blade moves forward with the boat and works at a sharp angle of
attack to the water (RBN 2018/05-06). At the beginning of the drive, the mobile
RP3 erg feels slightly heavier than the static Concept2 and
allows for a faster force increase, because the acceleration of a lighter mobile
flywheel is higher than the acceleration of a heavier rower’s mass on a static
erg.
On the contrary, during
the middle and second half of the drive a rowing machine feels heavier than the
boat (2). This is because the dynamic gearing is the lightest in the boat at the
perpendicular oar position and the blade slippage in the water is the highest.
Static erg feels the heaviest here and allows production of the highest force. At
the end of the drive, dynamic gearing in the boat increases again, which makes HDF
and applied force higher (3), and velocity lower.
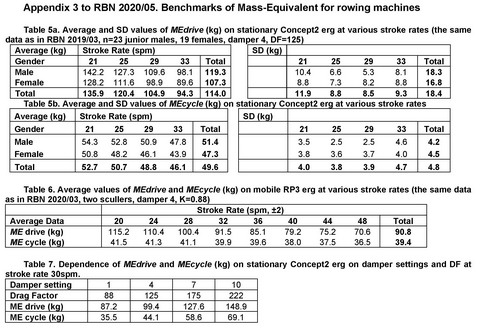
Tables 5-6 in the Appendix
3 show average ME values on rowing machines at various stroke
rates at the most common damper setting 4. Rowing on stationary Concept 2 should feel slightly
lighter than a 1x and heavier than a 2x, and the mobile RP3 is similar to 2- or
4x. Table 7 gives dependence of ME on the damper settings.
©2020 Dr. Valery Kleshnev www.biorow.com