


Effect of stretcher height on rowing technique

A new stretcher force
sensor has been developed recently in BioRow,
which consists of four load cells measuring only the horizontal force component
at the toes-heels/ left-right foot (Fig.1). With specific attachments, the
sensor can be used in any boat or rowing machine. A 2D version is available to
measure both horizontal and vertical force components.
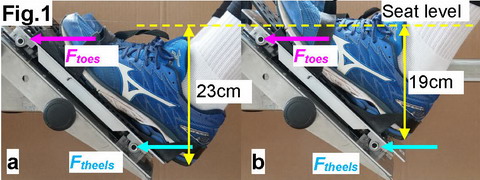
The sensor has been tested
on the RP3 rowing machine in a brief experiment with two different stretcher
heights: the lowest (a) at 23cm below the top of the seat, and the highest (b)
at 19cm. At each stretcher position, two international-level rowers repeated a
test consisting of eight short pieces of incrementally increasing stroke rate
from 20 up to 48 spm and free recovery between pieces. In addition to the
stretcher forces, handle force, positions of the handle, seat and trunk, and
acceleration of the stretcher-flywheel unit were all measured. To verify the accuracy
of the force measurements, the acceleration ad was
derived from the measured handle Fh and total
stretcher Fs forces and known mass of the moving unit m=27kg:
ad = (Fh
- Fs) / m (1)
It was
found (Fig.2,c) that measured acceleration fairly accurately corresponded to
the derived one at peak points, which was evidence of the accuracy of measured
forces. Some discrepancies could have occurred due to friction in the flywheel
unit.
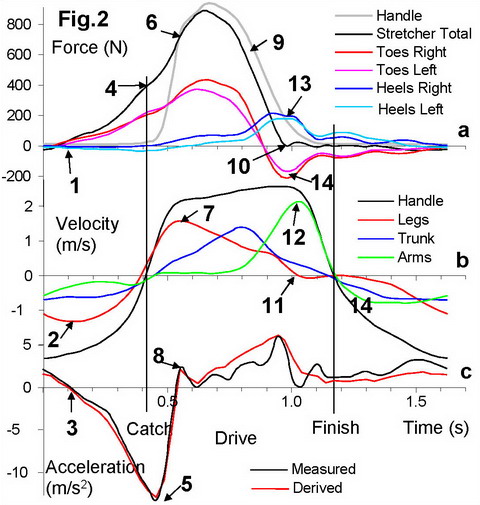
Fig.2 shows
a data sample at the low stretcher position at 36.9spm. The stretcher force
starts growing about 0.35s before catch (1), simultaneously the seat velocity
achieves its negative peak during the recovery (2) and the acceleration became
negative (3).
At the catch,
the stretcher force achieves nearly half of its peak value (4) at zero handle
force, which creates a sharp negative peak of the stretcher acceleration (5). Then,
the handle force rapidly grows and becomes higher than the stretcher force (6),
which coincides with the positive peak of the seat velocity (7) and the first
positive peak of the acceleration (8).
The
stretcher force remains lower than the handle force until the end of the drive
(9) reaching zero about 0.2s before finish (10) when the legs finish their
drive (11) and arms achieve their peak velocity (12). At this time, the heels
are still pushing the foot-board (13), but toes pull the straps in opposite
direction (14), so their forces are balanced.
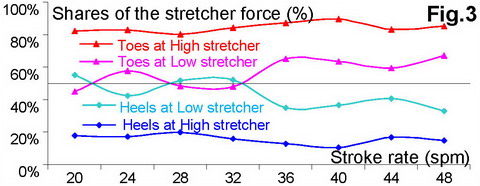
At the low stretcher position, the shares of toes and heels forces were nearly equal at low rates (Fig.3), and at rates higher than 32spm, about 60% of the force was transferred through toes and 40% - though heels. With the high stretcher, 80-90% of the force was pushed through toes, and only 10-20% through heels.
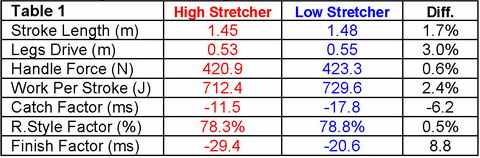
Table 1 shows average data
for two rowers in all samples. The main rowing indicators were better at the
low stretcher position: the stroke length and legs drive were longer by 1.7%
and 3.0%, average handle force and work per stroke were higher by 0.6% and
2.4%.
Catch
Factor was closer to the target with the low stretcher (as seat changes
direction earlier), but Rowing Style Factor was practically the same. Contrarily,
Finish Factor was better at higher stretcher, where it was always in the target
zone. At lower stretcher and low stroke rates, this indicator was positive –
shoulders continue drive movement, while the handle has already changed
direction to recovery.
The results of the
study indicate that lower stretcher position could be beneficial for rowing
power and technique. The obtained data has proved usability and accuracy of the
new BioRow stretcher force sensor.
©2020 Dr. Valery Kleshnev www.biorow.com