


The Biomechanics of the recovery phase

While the rowerŌĆÖs movements during the drive were comprehensively analysed in many different studies (rowing styles, force curves, etc.), the biomechanics of the recovery phase remain a grey area. As force and power are not produced during the recovery phase, the main variables to be analysed are the velocities of the handle and seat (legs), as well as (in small boats) velocities of the trunk and arms.
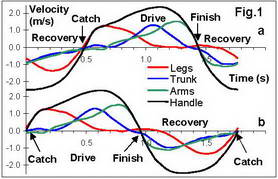 | The standard trigger of the stroke cycle in the BioRowŌäó telemetry software was defined as the moment when the oar crosses the zero angle (when it is perpendicular to the boat axis) during the recovery. So, the velocity curves appeared to be ŌĆ£brokenŌĆØ around the middle of the recovery (Fig.1,a), which makes them difficult to analyse. Therefore, all variables were transformed to make the cycle start at the catch (Fig.1,b) ŌĆō at the moment when the handle velocity changes itŌĆÖs sign from negative (recovery) to positive (drive). |
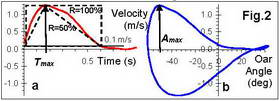 | The following discrete values were derived from each of above four velocity variables: ŌĆó Maximal velocities (Vmax) during both the drive and recovery and their points relative to the cycle time Tmax and the stroke length (oar angle) Amax (Fig.2). ŌĆó Average velocities (Vav) of the handle were determined as the ratio of the stroke length to the drive and recovery times. Other average velocities were more difficult to calculate, because body segments may be inactive during significant parts of the cycle. So, only velocities with a magnitude higher than a threshold of 0.1m/s were counted for its average values. ŌĆó The ratio of the average to the maximal velocity R = Vav/Vmax reflects the shape of the curve. R=100% for the perfect rectangular shape: constant velocity with immediate accelerations at the start and finish, which is not possible in real life; R=50% for the perfect triangular shape: constant acceleration to the peak, then constant deceleration. |
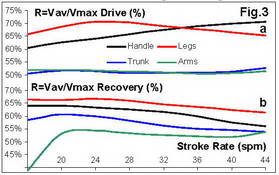 | Statistical analysis of our database (n=25658) revealed that shapes of all velocity curves vary between 50% and 70% (Fig.3), but their trends relative to the stroke rate were quite different. During the drive (Fig.3,a), the R of the handle velocity increases from 60% to 70% at higher rates. In sculling these numbers are 3-4% lower than in rowing. The trunk and arms showed nearly constant RŌēł50%, which means their curves are close to the perfect triangle. During the recovery phase (Fig.3,b), the velocity curves became more triangular at higher rates: R decreases from 64% down to 55%. Contrarily to the drive, the values were 4-5% higher in sculling than in rowing. These findings are yet to be interpreted. |
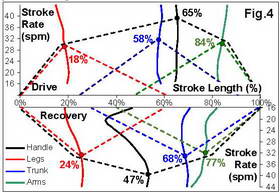 | Fig.4 shows average Amax values, how the point of maximal velocity is affected by the stroke rate and schematic curves of the velocities. It confirms that the most typical sequences are: legs-trunk-arms during the drive, and arms-trunk-legs during recovery. A strong correlation (r=0.76, n=8961) was found between Amax points of the trunk velocity during the drive and recovery, which statistically confirms the ŌĆ£mirror principleŌĆØ (RBN 2006/03,07): A well-timed preparation of the trunk (ŌĆ£pivoting around hipsŌĆØ) during the middle of recovery is related to its later engagement during the drive and the most optimal sequence. Later, trunk preparation during the recovery (ŌĆ£diving into the catchŌĆØ) is related to an early ŌĆ£openingŌĆØ of the trunk during the drive, which is inefficient. For arms, this correlation was much less significant (r=0.33), and statistically insignificant for legs and handle velocities (r=0.07), which means the mirror principle is less applicable for arms and not applicable legs and handle. |