


Refined balance of propulsive forces

The determination of the fine balance of propulsive forces in the rower-boat-oar system is important for understanding the exact mechanics of force and power transmission from the blade hydrodynamic forces ŌĆō to the movement of the system. Clear understanding of these mechanics would help to optimise efficiency of the system and improve performance. Previously, it was not possible to obtain this balance accurately and discrepancies were found between the blade propulsive force (defined in that way) and the force acting on the rower-boat system (RBN 2019/02, 2020/12). With our latest BioRow developments: the method of determination of the exact centre of pressure (CP) on the blade (RBN 2020/10) and 4D instrumented handle (RBN 2021/06) measuring the axial handle force, it became possible to complete the puzzle and derive the exact balance of propulsive forces in rowing.
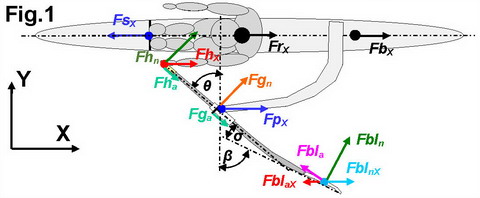
The measurements were made in the same instrumented single as before (RBN 2019/01-2), so we wonŌĆÖt repeat the description. The propulsive force FbX at the boat (Fig.1) was also defined as before, as the difference between the pin FpX and stretcher FsX forces (sum of opposite vectors):
The propulsive force applied to the rowerŌĆÖs centre of mass CM FrX was defined as the difference between the stretcher reaction force Fsx and the resultant X handle force FhX, where the latter is the vector sum of X components of normal Fhn and axial Fha handle forces. Previously (RBN 2019/02), it was assumed that Fha is equal to the measured axial gate force Fga, and ŌĆ£they could be slightly differentŌĆØ, which appeared to be not quite true. Now, the axial handle force Fha was measured directly with our new BioRow 4D instrumented handle (RBN 2021/06) and used in the equation for the rowerŌĆÖs propulsive force FrX:
FrX = FsX ŌĆō FhX = FsX ŌĆō (Fhn cos(╬Ė) + Fha sin(╬Ė)) (2)
The system propulsive force FsysX was defined as the vector sum of the boat and rowerŌĆÖs CM forces:
FsysX = FrX + FbX (3)
 The normal blade force Fbln was defined in RBN 2020/10 from the measured torque at the oar and actual outboard calculated using CP position at the blade. The axial blade force Fbla was derived as in RBN 2021/06: as the vector sum of axial forces at the handle Fha and gate Fga, with correction for transfer of the normal blade force caused by oar bend angle Žā:
The normal blade force Fbln was defined in RBN 2020/10 from the measured torque at the oar and actual outboard calculated using CP position at the blade. The axial blade force Fbla was derived as in RBN 2021/06: as the vector sum of axial forces at the handle Fha and gate Fga, with correction for transfer of the normal blade force caused by oar bend angle Žā:
Fbla = (Fha ŌĆō Fga - Fbln*sin(Žā)) / cos(Žā) (4)
The total blade propulsive force FblX was defined as the vector sum of X components of the blade normal FblnX and axial FblaX forces:
FblX = FblnX + FblaX = Fbln cos(╬▓) + Fbla sin(╬▓) (5)
where the blade angle ╬▓ was calculated as the sum of measured oar angle ╬Ė and shaft bend angle Žā derived from oar stiffness factor and blade normal force Fbln:
╬▓ = ╬Ė + Žā (6)
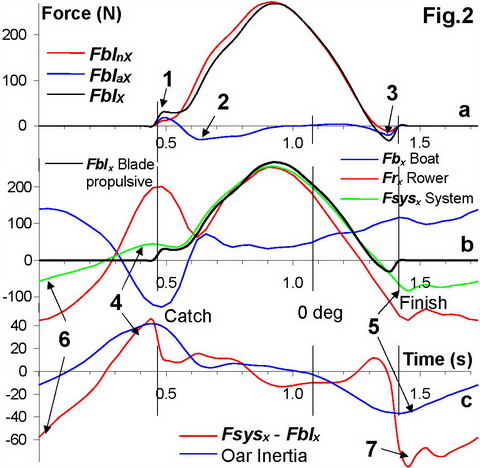
At the very beginning of the drive (Fig.2,a, data in M1x at 34spm), the blade axial force is the main contributor to the oar propulsion (1), but then it plays a negative role and creates a braking force during the first half of the drive (2) and before the finish (3). Therefore, it is important to minimise the drag caused by axial blade force and make the blade and boat surface as smooth as possible.
The curves of propulsive forces at the blade FblX and the rower-boat system FsysX were very similar (Fig.2,b) and correspond much better than in previous experiments, so their average values over the drive differ only by 0.5%. The main reason of the difference between the curves was the inertial forces of the blade (Fig.2,c), which increase to the system propulsion FsysX at the catch (4, oar rotation decelerates and inertia pushes pins forward), but decrease it after the finish (5, oars accelerate and pushes pins backwards). The cause of excessive braking force during the middle of recovery (6) could be the aerodynamic drag of the oars. After the finish (7) ŌĆō hitting water with feathered blades (the average FsysX - FblX over the cycle was -15N).
Concluding, the main achievement of this study was to obtain the refined balance of propulsive forces in the rower-boat-oar system, which confirms the validity of our models, accuracy of the measurements, and allows further extended studies and optimisation of rowing biomechanics.
 Thanks for help with this study to my wife Katerina, Marlow RC coach, who sadly left us on the 8th September.
Thanks for help with this study to my wife Katerina, Marlow RC coach, who sadly left us on the 8th September.
┬®2021 Dr. Valery Kleshnev www.biorow.com