


Front-line research on oar mechanics

A new research project on theoar and the rowing system mechanics was started inOctober. The deficiency of previous studies was due to a lack of data on the pointsof force application at the oar handle and the blade. This kept unknown thereal amount of force, the acting inboard and outboard levers, the gearing ratio,etc. A new measurement method has been developed which fills the above gap inour knowledge and allows us to define the real forces acting on the rowing systemand hence the mechanics of power transfer and propulsion efficiency.
A pair of sculling oars (Concept2 skinnies with Smoothies blades, 88/288cm) hasbeen instrumented with four strain-gauge sensors, full bridges with amplifiers,glued directly onto the shaft at certain positions: two sensors on inboard andtwo on outboard (Fig.1, S1 – S4).

The sensors have been calibratedto measure the torque at their positions by means of the dynamically appliedforce multiplied by its lever ( the distance from the sensor to the point offorce application at the handle or blade). Calibration was repeated at 4-5points for each sensor and coefficients were very consistent.
When a force is applied tothe oar handle and blade during rowing, the shaft bends and each sensor measurestorque M at its position, which depends on both the force Fand its lever L relative to the sensor.
M = F L (1)
Each sensor in a pair oninboard and outboard measure their own torque M1 and M2,which depends on their levers L1 and L2,but the force F is the same, so we can define it as:
F = M1 / L1 = M2 / L2 (2)
As the positions of the sensors are constant andthe distance S between them is known, this defines the differencebetween levers:
S = L1 – L2 or L1 = L2 + S (3)
Then, converting equation 2 and substituting L1:
M1/M2 = L1/L2 = (L2+S)/L2= 1+(S/L2) (4)
Finally:
L2 = S M2 / (M1 – M2) (5)
Or, with substitution of L2:
L1 = S M1 / (M1 – M2) (6)
In this way the actinglevers of forces can be derived and thereby the exact positions of the centreof force application at the oar handle or blade by means of comparing a pair ofmeasured torques on the shaft at known positions of the sensors. Knowing theactual levers of the measured torques, the real acting force F onthe oar handle and blade can be derived with the equation 2 .
The method has been successfullyverified by means of hanging weights at various points on the oar handle and blade,then comparing the real position with the calculated one based on measuredtorques. The video of verification and testing can be found here:
https://drive.google.com/drive/folders/1R7qYGfABbHQUQKfrOHYDbJtKJDHSNJEF?usp=sharing
Here are brief results ofthe first measurements with this new method in M1x at 30spm. The boat was also instrumentedwith many other sensors (gates, stretcher, pin forces, see RBN 2019/01) to verifynew variables.
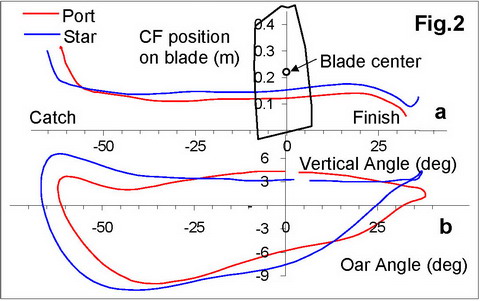
The position of centre offorce (CF) at the blade was found slightly away from itsgeometrical centre, closer to outer edge (Fig.2a). Actual outboard was slightlyshorter on the starboard side, which coincided with deeper placement of theblade into the water. At catch, the actual outboard was shorter and at thefinish – slightly longer, which could be related to inertia forces at the bladeaccelerations.
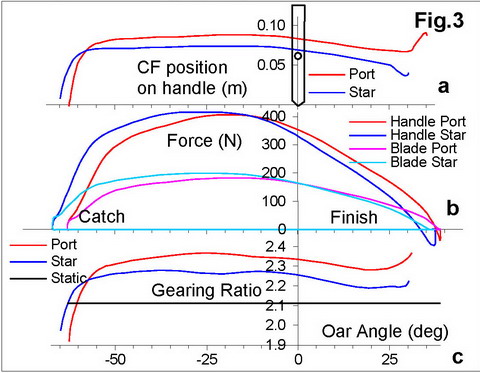
CF positions on the handlewere also not exactly at its centre, but further away from the top. The portside had shorter actual inboard, contrarily to the actual outboard (Fig.3a). Thisleads to heavier actual gearing ratio on the port side. Both sides had gearingheavier than static one defined at the geometrical centres of the handle and blade.
More results of the studywill be published soon.
Acknowledgements: Thanks to Concept2 Inc. and personally to DickDreissigacker for interest and kind support of this study.
©2020 Dr. Valery Kleshnev www.biorow.com