


Stretcher force and seat movement
There have been numerous BioRow clients
who have asked the same question: “Does the BioRow
system measure stretcher force?” The answer is yes, we can do
it with a number of methods (RBN 2013/08, 2017/05), but the installation of stretcher
force sensors is a very time-consuming and non-trivial task, because boats of
various brands have a large variety of stretcher designs. Therefore, we do not
measure the stretcher force directly in the BioRow
standard testing routine (where installation time is very limited, from 20min
for 1x to 70min for 8+), but can estimate it based on the seat movement. Here, relationships
between the stretcher force and seat movements will be analysed.
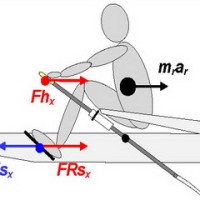
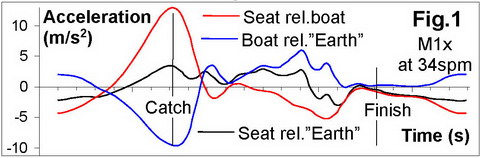
Data was collected in a single equipped with the standard BioRowTel system (RBN 2009/10, 2017/12), augmented with the stretcher sensor measuring the horizontal force component at three points (RBN 2013/08, 2019/01). A male sculler (1.84cm, 85kg) performed the standard BioRow test protocol with an incrementally increasing stroke rate from 18 to 41 spm. The seat position was measured with the BioRow string sensor (2014/12) and was used for calculating the seat acceleration relative to the boat, which was summed up with the boat acceleration, so the seat acceleration relative the global frame of reference (the “Earth”) was derived (Fig.1):
 |
Fhx + mrar
- Fsx = 0 (1)
where mrar
is an inertial force acting on the rower’s CM, which is a product of its mass mr
and acceleration ar. So, the stretcher force could be
derived as:
Fsx = Fhx
+ mrar (2)
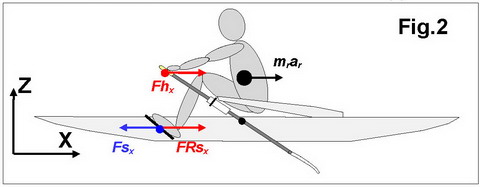
In this study, we assume that the
movement of the rower’s CM could be represented by seat. Of course, this is not
completely accurate, because the upper body and oar could move significantly differently
from the seat, which would affect both the moving rower’s mass mr
and its acceleration ar. Also, a few other factors
affect the balance of handle-stretcher forces, but are not included in Eq.1-2: 1)
axial handle force, which is statically transferred to the stretcher (RBN 2019/02),
2) smaller friction force at the slides, 3) aerodynamical drag force acting on
the rower’s body. All these assumptions are limitations of the accuracy of the
study.
The stretcher force derived
with Eq.2 during the stroke cycle Fsx(d) was compared
with the directly measured stretcher force Fsx(m) (Fig.3).
It was found that both forces were very similar during the recovery but quite
different during the drive, which is a consequence of the mentioned
limitations.
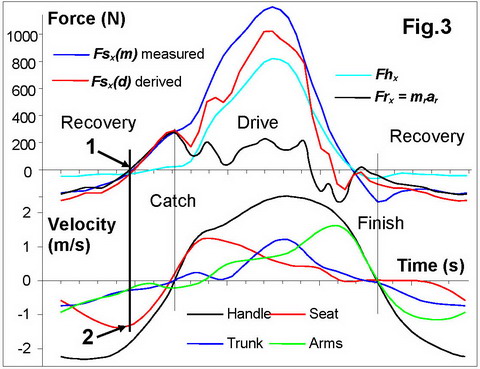
Importantly, both Fsx(m)
and Fsx(d) curves cross zero at the same time before the
catch (1): at this moment, the rower switches from pulling the stretcher
(negative force) to pushing it (positive stretcher force), and this moment
coincides with the negative maximum of the seat velocity during the recovery (2).
Therefore, this study confirms that
the seat movement can be used as an adequate indication of the stretcher
force during the recovery.
In BioRow reports, the time at which there is
a negative peak of seat velocity (2) is used as a starting point for the evaluation
of rowers’ synchronisation in a crew (T1, RBN 2014/05, 2015/03). Therefore, the seat movement indicates synchronisation of
rowers’ interactions through the stretcher before and at the catch, which is important
for effective crew dynamics.
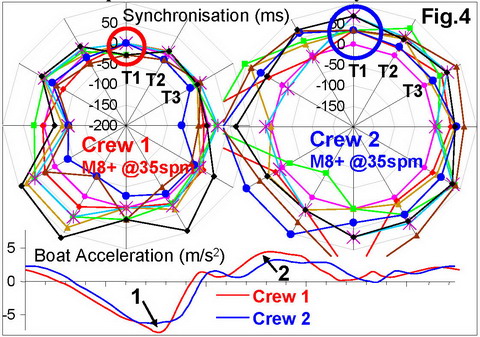
Fig.4 illustrates above point: better synchronisation of the seat movement in crew 1 before (T1) and at the catch (T2-T3) is related to the optimal pattern of boat acceleration (1) and more effective dynamics of the crew during the drive (2).
©2019 Dr. Valery Kleshnev www.biorow.com