


New system for erg biomechanics

New system for erg biomechanics
A new system for biomechanical measurements on the Concept2 ergometer was developed by BioRow Ltd. for Oxford Brookes University. The system measures the following variables:
• Displacements of the handle, seat and rower’s shoulders were measured with string-potentiometer position sensors (TE Connectivity SP1 and SG1, Fig.1,a);
• Handle force was measured with a BioRow wireless handle force sensor (Fig.1,b), which also measured 3D handle accelerations and 3D rotations;
• With a new BioRow sensor, four stretcher forces were measured separately (Toes-Heels/Left-Right) in the perpendicular direction to the foot-board (Fig.1,c).

The data was collected at 25Hz, then samples were processed using the standard BioRow averaging method (RBN 2012/12). 14 junior male scullers aged 15-17 performed a test consisting of four pieces of only 15 strokes each at 20, 26, 32 and 40 spm, all pieces with maximal force application. The rowers were divided into 3 groups:
• A - National champions and medallists in juniors (n=4);
• B - Experienced rowers of a level of B-C finals (n=5);
• C - Beginners with one year rowing experience (n=5).
Fig 2 show data of one of the best scullers at 32spm. It was found that total stretcher force grows early before the catch by means of toes force, which was contributed by both horizontal and vertical forces (weight transfer on the stretcher, RBN 2013/08). The toes force remains constant at about 100N all the way during recovery.
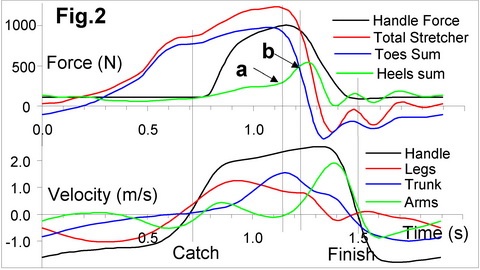
Heels force starts increasing slowly after the catch, then starts accelerating (Fig.2,a), when the trunk velocity had achieved its maximum, but toes force starts decreasing at the same time and total stretcher force goes down as well. Interestingly, the heels force gets higher than toes force at the same time as total stretcher force decreases below the level of the handle force (b). Soon after this moment, the toes force becomes negative - the rower starts pulling the belts, while the heels force achieves its maximum at the same time.
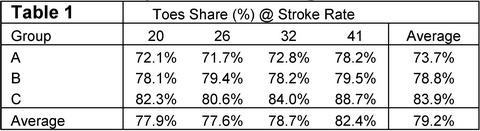
Toes, heels and total stretcher forces were averaged during the drive, and ratio Rt of the average toes force to the total stretcher force was derived, which indicates the share of the stretcher force transferred through the toes. In the tested group this share ranged from 53.2% to 92.6%. It was found that Rt is inversely proportional to the level of rowers (Table.1): from group C to A it decreases from 83.6% down to 73.7%, which means better rowers transfer relatively more force through the heels.
To analyse the difference in stretcher force distribution, two scullers were selected with opposite values of Rt: 69.5% for the sculler 1 and 90.3% for sculler 2 (Fig.3).
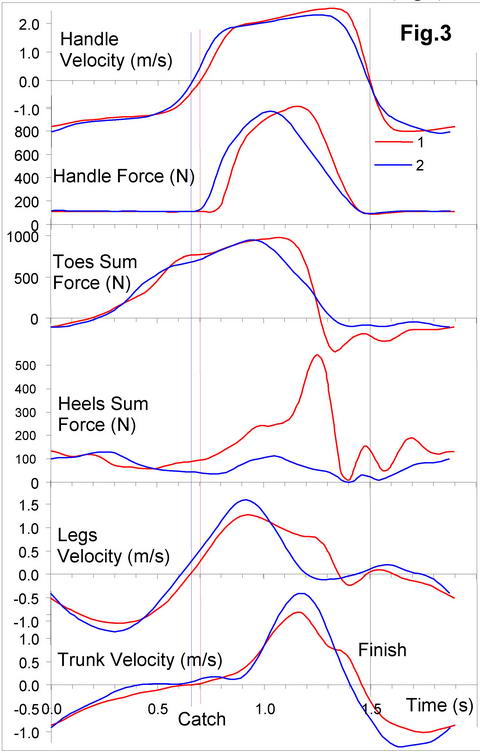
Rower 2 transfers practically all force through the toes, which was observed visually – his heels were detached from the foot-board during the second half of the drive, when his force curve was lower than that of sculler 1. This regularity was confirmed statistically: Rt had positive correlation r=0.49 with finish force gradient, and negative correlation r=-0.50 with position of the peak force. This means better force transfer through the heels helps to maintain handle force during the second half of the drive.
©2017 Dr. Valery Kleshnev www.biorow.com